AUTOSAR CP Watchdog Manager模块详解
本文章所参考的 AUTOSAR 标准为 4.4.0 版本
简介
Watchdog Manager 在 AUTOSAR 架构中扮演着应用层软狗机制的角色,负责监控被称为“监控实体”的对象。其监控方式涵盖以下三种:
Alive Supervision:专门监控周期性任务是否按预期周期性运行,确保任务没有遗漏或延迟执行。Deadline Supervision:关注事件型任务的执行时间,确保任务在规定的时间内完成,防止任务超时导致的系统不稳定。Logical Supervision:用于监控任务的执行时序,保证任务之间的依赖关系和执行顺序正确无误。
为了实施这些监控机制,每个监控实体都会设置相应的 Checkpoint。一个监控实体可以有一个或多个 Checkpoint,这些 Checkpoint 及其转换关系在单个实体内部被称为内图,而涉及不同监控实体的 Checkpoint 及其关系则构成外图。
具体应用中,一个监控实体可能会采用上述三种监控机制中的一种、多种或全部,这完全取决于实际应用场景和需求。基于这些监控机制的结果,每个监控实体都会计算出一个被称为 Local Status 的本地状态。
最终,当所有监控实体的状态被确定后,Watchdog Manager 可以综合这些信息,得出整个 MCU 的监控结果,即 Global Status。这一全局状态为系统提供了关于其整体运行状况的全面视图,有助于及时发现并处理问题,确保系统的稳定运行。
工作原理
S1:Watchdog Manager模块通过与Watchdog Interface(Watchdog If)和Watchdog Driver的交互来设置看门狗喂狗的触发条件。这一触发条件通常由Watchdog Manager的函数接口来重置Watchdog Driver中的Counter值。S2:在系统运行过程中,Watchdog Driver会持续监控Counter的值。若Counter不为 0,表示系统仍在正常运行范围内,Watchdog Driver会进行一次喂狗操作,并将Counter值减一。S3:如果Counter值没有被Watchdog Manager及时重置,它将逐渐减少至 0。一旦Counter值到达 0,Watchdog Driver将停止喂狗,此时看门狗会触发系统复位操作,以恢复系统的正常运行。如果系统恢复正常,流程将回到S2继续执行。
在特殊情况下,如果触发条件不满足,导致无法正常喂狗,存在两种复位方式可供选择:
- 等待看门狗超时复位:在这种情况下,
Watchdog Driver会停止喂狗,并等待看门狗超时后自动触发系统复位。 - 主动立即触发系统复位:当
Watchdog Manager检测到严重错误时,它可以主动触发系统立即复位,以避免潜在的系统崩溃或数据损坏。
这两种复位方式可以根据实际需求和应用场景选择使用。需要注意的是,Watchdog Driver 的初始化过程不应由 Watchdog Manager 负责,而应由 EcuM(Electronic Control Unit Manager)模块来完成。同时,Watchdog Manager 的初始化应在操作系统(OS)启动之后执行,以确保其正常工作并监控系统的运行状态。
Alive Supervision
针对周期性任务,监控实体在预设时间内的执行次数是固定的。通过这一机制,我们能够精准检测周期性任务的执行频率是否异常,确保系统稳定运行。
AUTOSAR 中 Alive Supervision 监控机制需要配置以下四个基本参数:
WdgMExpectedAliveIndications(期望指示次数): 指定在给定的时间周期内,监控实体(SE)应调用WdgM_CheckpointReached函数的次数。这是预期的正常调用次数。WdgMMaxMargin(最大允许偏差): 表示实际调用WdgM_CheckpointReached函数次数可以超过期望次数的最大值。实际允许的最大调用次数为WdgMExpectedAliveIndications + WdgMMaxMargin。WdgMMinMargin(最小允许偏差): 表示实际调用WdgM_CheckpointReached函数次数可以低于期望次数的最大值。实际允许的最小调用次数为WdgMExpectedAliveIndications - WdgMMinMargin。WdgMSupervisionReferenceCycle(监控参考周期): 定义了WdgM_Mainfunction函数的调用周期,即监控的时间基准。
以配置{4, 1, 1, 2}为例,这表示 WdgM_Mainfunction 函数两次。在这两次内,对应的 WdgM_CheckpointReached 函数的调用次数应在(4 - 1) = 3 次到(4 + 1) = 5 次之间。若超出此范围,则视为超时,并根据 AUTOSAR 状态机规范更新该监控实体(SE)的 Local Status,以反映其不符合预期的运行状态。
Deadline Supervision
如前文所述,Deadline supervison 主要用于非周期性的监控实体 SE,该类监控实体往往都是事件型进行触发,触发之后的监控实体 SE 执行的时间不能过长,同时也不能过短,这个 SE 的执行时长就需要通过相应的阈值进行限定,从而来监控其运行状态是否满足设计要求。
对于每一个 SE 的 Deadline Supervision,两个 Checkpoint 时必须需要进行配置的,因为 Deadline Supervision 就是针对两个 Checkpoint 之间的 Transition 执行时间进行监控,即针对监控实体 SE 执行的动态行为进行监控。
AUTOSAR 中 Deadline Supervision 监控机制需要配置以下两个基本参数:
WdgMDeadlineMin:这是两个Checkpoint之间Transition所允许的最小执行时间。它确保SE不会执行得过快,从而可能忽略关键任务或跳过必要的步骤。WdgMDeadlineMax:这是两个Checkpoint之间Transition所允许的最大执行时间。它防止SE执行时间过长,从而可能导致系统延迟或其他性能问题。
重要的是,此类监控的 SE 中不允许存在 Checkpoint 的嵌套行为。例如,Start1, Start2, End2, End1 这样的顺序是不被允许的,因为这可能导致时间监控的混乱和不可预测的行为。
以配置{30ms, 40ms}为例,这表示对应的 SE 在两个 Checkpoint 之间的 Transition 执行时间必须在 30 毫秒到 40 毫秒之间。如果实际执行时间超出这个范围,则视为超时,系统会根据 AUTOSAR 状态机规范更新该监控实体(SE) 的 Local Status,以反映其不符合预期的运行状态。
Logic Supervision
在 ISO 26262 中,程序流监控是确保行车安全的关键环节。它能够有效识别软件运行中的设计意图偏离,并采取相应的纠正措施,从而保障车辆系统的稳定运行。
Logic Supervision 在 AUTOSAR 中扮演着确保程序流运行时序正确性的关键角色,这对于满足功能安全要求的电子控制单元(ECU)来说至关重要。它通过比对实际运行过程中 Checkpoint 之间的转换关系与预先设定的 Checkpoint 转换关系来进行判断。如果实际转换关系与设定不符,系统会报告错误;若实际转换关系符合预设要求,则程序运行正常。
通过 Logic Supervision,可以及时发现并处理程序流中的时序错误,从而确保 ECU 在复杂多变的车辆运行环境中能够稳定、可靠地执行其功能。这种监控机制有助于提高车辆的整体安全性和可靠性,是功能安全标准中不可或缺的一部分。
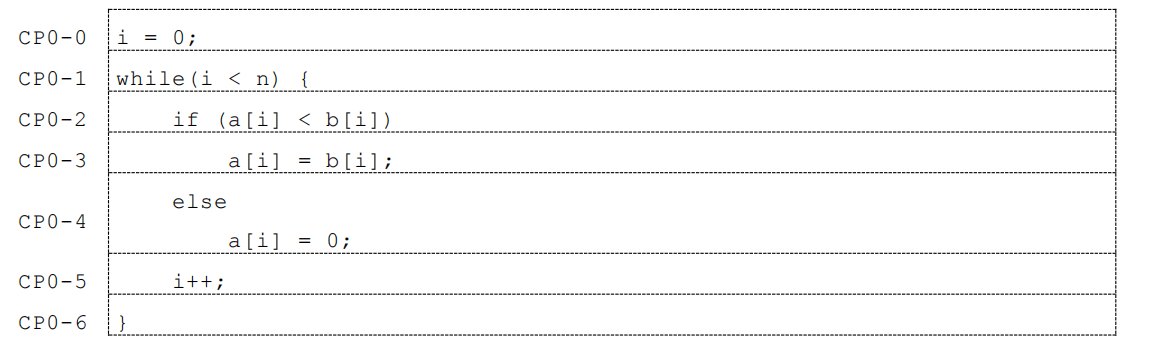
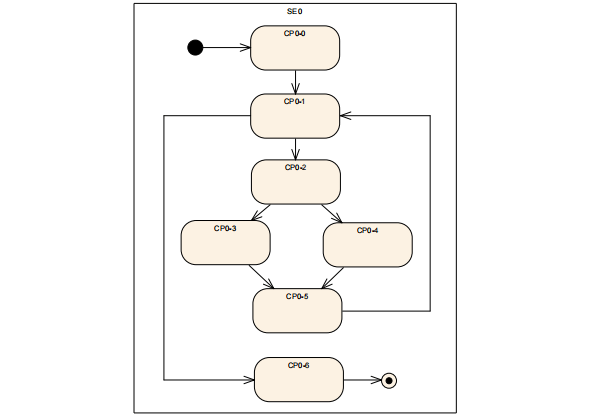
如上图我们可以知道我们将每个代码执行步骤分成了上面 7 个 Checkpoint,其简化模型如下图所示:
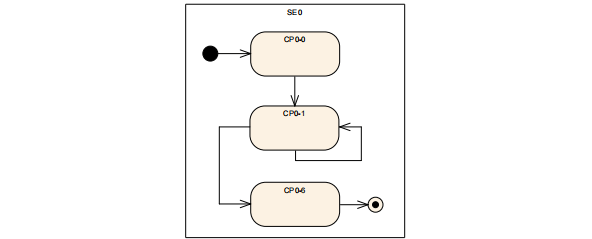
也可以抽象成以下形式:
在 Logic Supervision 中,识别两两 Checkpoint 之间的转换关系是否属于静态配置的转换关系 Group 是关键步骤。这些静态配置的转换关系 Group 定义了哪些 Checkpoint 之间的转换是合法和预期的。
当程序执行时,Logic Supervision 会监控当前 Checkpoint 与下一个 Checkpoint 之间的转换关系。如果这个转换关系包含在静态配置的转换关系 Group 中,那么认为程序执行的是正常的序列行为。如果转换关系不在配置的 Group 内,则表明发生了异常,可能是程序逻辑错误或其他问题导致的。
为了确保程序流的正确性,开发人员需要仔细定义和配置这些转换关系 Group。这些 Group 应该基于程序逻辑和功能需求来设计,以确保它们能够准确反映程序执行过程中的合法切换路径。
工作流程
Watchdog Manager 模块的运行流程如下:
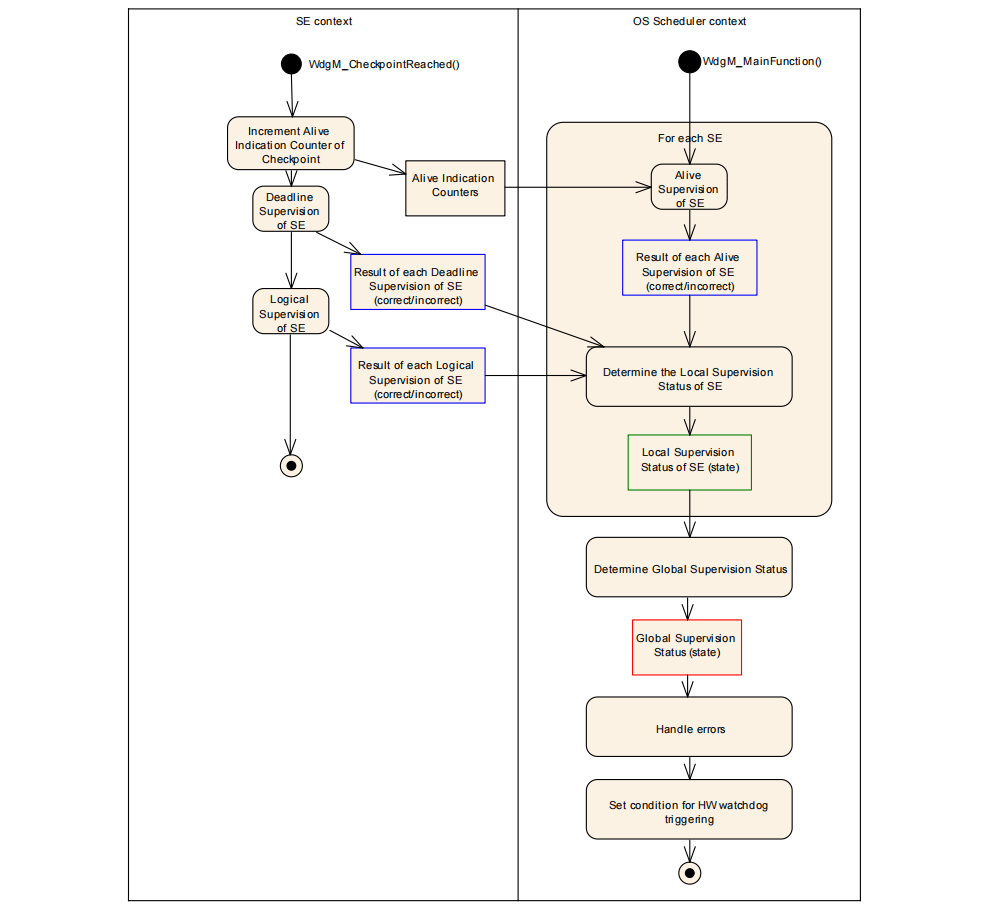
基于上图的 Watchdog Manager 模块运行流程,我们可以得出以下重要结论:
- 对于采用
Alive Supervision的监控实体,其运行状态和生命周期的判断结果,在WdgM_Mainfunction函数中得出。 - 对于采用
Deadline Supervision或Logical Supervision的监控实体,其判断结果则在WdgM_CheckpointReached函数中得出。
API
| 函数名 | 函数功能 |
|---|---|
| WdgM_Init | 初始化 WdgM 模块 |
| WdgM_DeInit | 反初始化 WdgM 模块,在执行本函数之前,因设置看门狗最大超时时间,确保其能正常进入 WDGIF_OFF_MODE,或者复位 |
| WdgM_GetVersionInfo | 返回 WdgM 模块的版本信息 |
| WdgM_SetMode | 设置提前预设好的工作模式 |
| WdgM_GetMode | 获取当前的工作模式 |
| WdgM_CheckpointReached | 通知 WdgM 已经到达了 SE 的 Checkpoint |
| WdgM_GetLocalStatus | 获取一个 SE 的 Local Status |
| WdgM_GetGlobalStatus | 获取 Global Status |
| WdgM_PerformReset | 主动触发复位 |
| WdgM_GetFirstExpiredSEID | 获取第一个超时的 SE 的 ID |
| WdgM_MainFunction | WdgM 循环处理的周期执行函数 |
软件实现
待更新
参考
 微信
微信- 支付宝